0x01 安全术语
| 缩写 | 全称 |
|---|---|
| EE架构 | 汽车电子电气架构 |
| ECU | Electronic Control Unit,电子控制器单元 |
| T-BOX | telematics box,远程通信模块 |
| CAN | Controller Area Network,控制器区域网络,总线协议之一 |
| LIN | 总线协议之一,串行通讯网络 |
| FlexRay | 总线协议之一,一种时间触发式的总线系统 |
| ADAS | Advanced Driver Assistance Systems,高级驾驶辅助系统 |
| BCM | 汽车车身控制模块 |
| VCU | 整车控制器 |
| ACU | 自动驾驶域控制器 |
| HU | 车载娱乐信息系统 |
| TSP | Telematics Service Provider,汽车远程服务提供商 |
0x02 车联网概念
车联网即“汽车移动物联网技术”,是指装载在车辆上的电子标签通过无线射频等识别技术,实现在信息网络平台上对所有车辆的属性信息和静、动态信息进行提取和有效利用,并根据不同的功能需求对所有车辆的运行状态进行有效的监管和提供综合服务。
这一技术概念的核心是交通信息网络控制平台通过装在每辆汽车上的传感终端,实现对所有车辆的有效监管并提供综合服务即ITS,智能交通。是将先进的传感器技术、通信技术、数据处理技术、网络技术、自动控制技术、信息发布技术等有机地运用于整个交通运输管理体系而建立起的一种实时的、准确的、高效的交通运输综合管理和控制系统。
2.1 车联网的系统体系
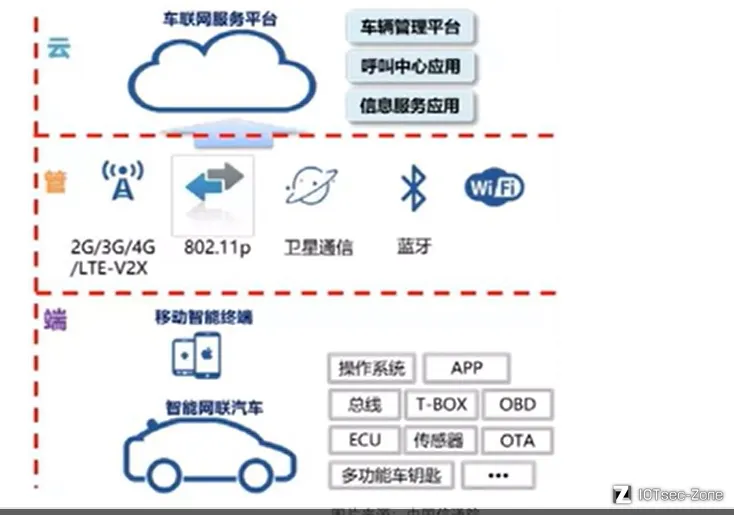
网络上看,车联网系统是一个“端管云”三层体系:
- 第一层 端系统,是汽车的智能传感器,负责采集与获取车辆的智能信息,感知行车状态与环境;是具有车内通信、车间通信、车网通信的泛在通信终端;同时还是让汽车具备IOV寻址和网络可信标识等能力的设备。
- 第二层 管系统,实现车辆自组网及多种异构网络之间的通信与漫游,同时它是公网与专网的统一体。
- 第三层 云系统,车联网是一个云架构的车辆运行信息平台,是多源海量信息的汇聚,因此需要虚拟化、安全认证、实时交互、海量存储等云计算功能,其应用系统也是围绕车辆的数据汇聚、计算、调度、监控、管理与应用的复合体系。
2.2 车联网系统组成
从云端角度,三部分:车联网联车平台、车联网服务平台、OTA平台
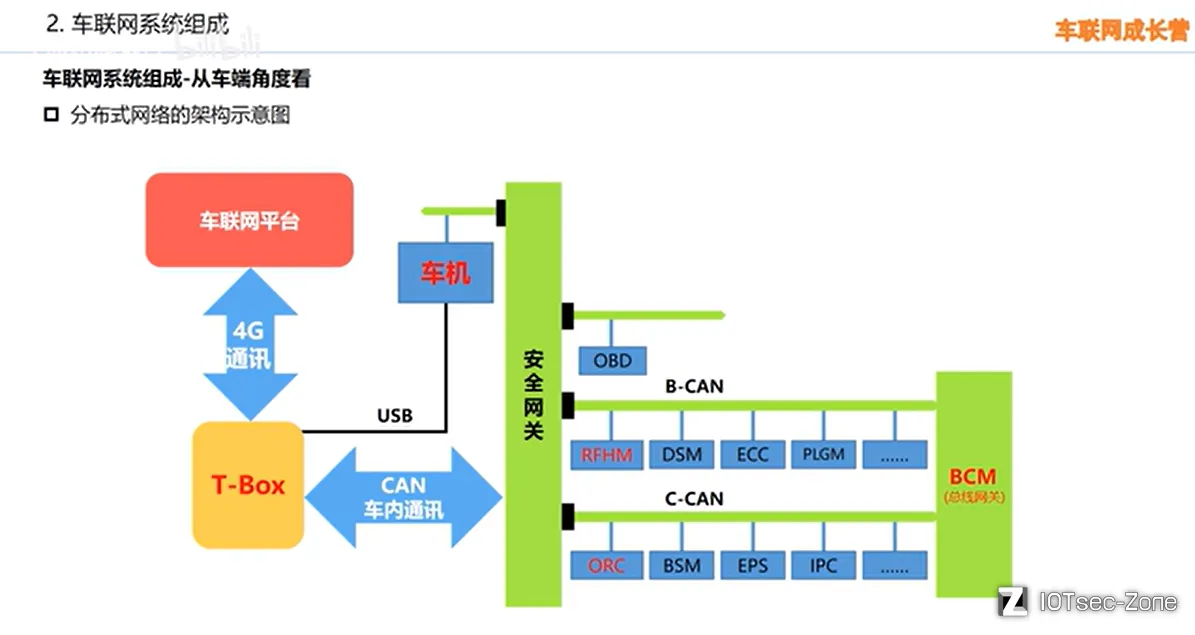
从车端角度:T-BOX、车机、汽车网络架构
2.3 车联网的功能
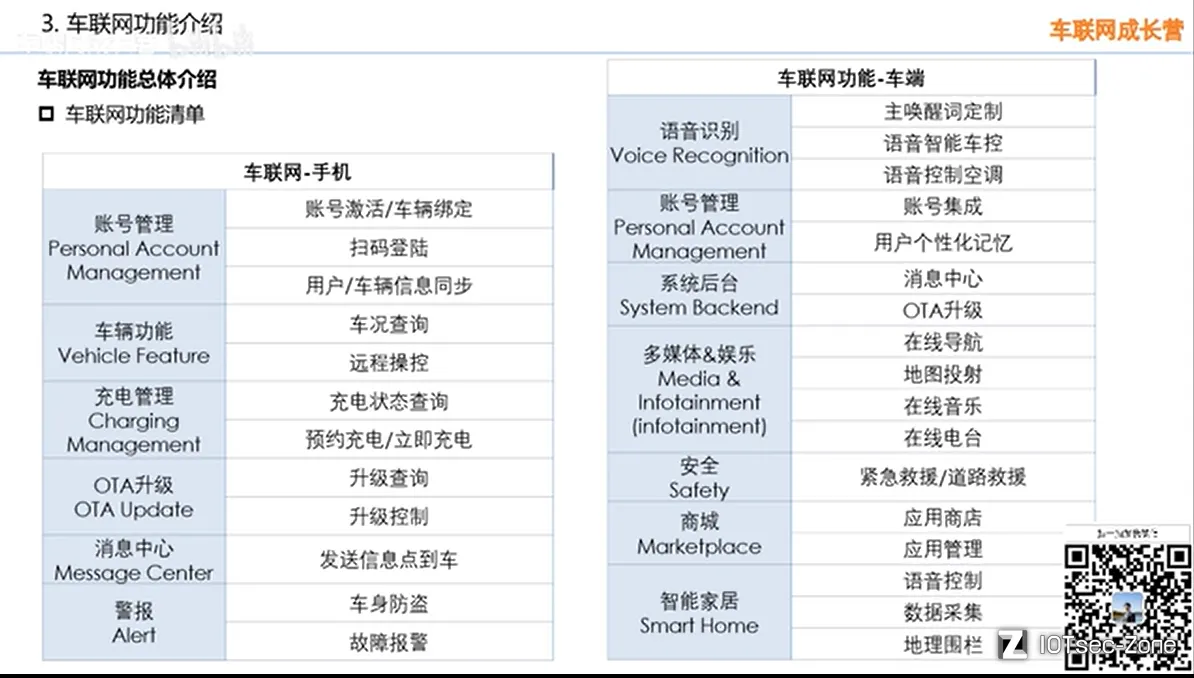
- 车辆安全
- 事故管理
- 车辆监控
- 车辆调度
- ETC
- 信息娱乐
0x03 T-BOX
3.1 概述
T-BOX telematics box,远程通信模块,核心功能是给车辆赋予联网能力
3.2 智能网联通讯系统架构
五部分:车端、通道、云端、后端、智能终端
3.3 T-BOX的位置
T-BOX在车端电子架构中的位置,基本是独立一路TBOX域,或者在信息娱乐域。通常与EHU通过USB或ETH连接,为EHU供网
3.4 T-BOX接口
T-BOX车端接口:
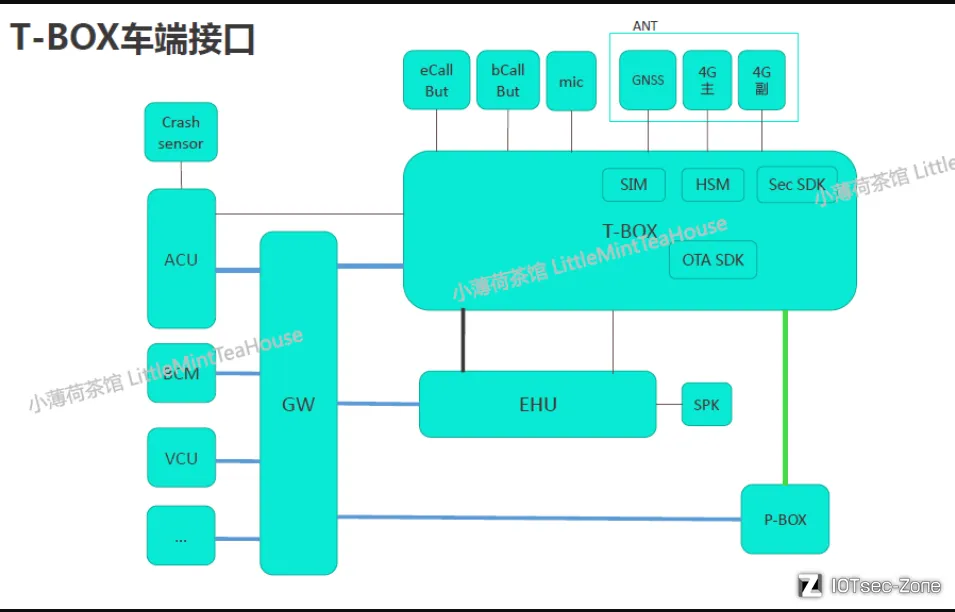
T-BOX自身接口:Call按键信号输入、按键检测、音频输入输出、射频天线、无线通信天线、内置WIFI/BT天线等
3.5 T-BOX主要功能
主要功能:
- 网络接入——作为车端与车联网连接的入口,给车机等提供上网服务
- OTA——Over-The-Air,汽车远程升级,替代线缆或者其它本地连接方式,通过无线传输方式进行软件下载和软件更新的过程。OTA 常见类型包括SOTA(Software OTA,应用软件升级)和COTA(Config OTA,配置更新)、 FOTA(Firmware OTA,固件升级)。通过 OTA 能够为车端添加新功能、修复漏洞等
- 远程控制——使用移动应用程序控制车门开关、调节空调等。手机应用首先将指令发给服务端,然后服务端将指令交由 TBOX 来执行,TBOX 通过主连接器上的 CAN 总线等将指令传送给 ECU 执行
- 位置查询/车辆追踪——提供车辆的实时定位信息,可通过手机应用查询车辆的实时位置以及历史轨迹
- 电池管理——对电池的实时监控、管理、维护
- 位置提醒——为车主提供维护保养、驾驶风格建议,提高用户车主的用车体验
- eCall——Emergency Call,紧急呼叫
- 远程诊断——指汽车在启动时,获知汽车的故障信息,并把故障码上传至数据处理中心。系统在不打扰车主的情况下复检故障信息。在确定故障后,并实施远程自动消除故障,无法消除的故障以短信方式发送给车主,使车主提前获知车辆存在的故障信息,防范于未然
- 平台监控/国家监管——利用已经安装在车辆上的车载通讯单元( TBOX)实现将国家要求的高压电相关静态数据、动态数据和故障状态实时传输到政府平台
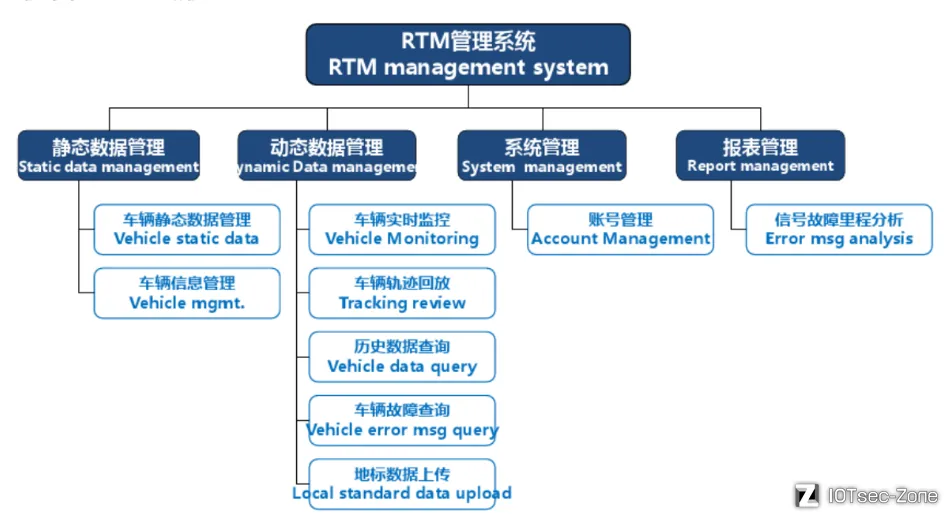
3.6 RTM实时监控
RTM 系统发送信息的路径,FCM(Forward Collision Mitgation system,前方碰撞预防辅助制动系统) 负责收集 4 路 CAN 线的信息,过滤后通过 RTM-CAN 发送给 TBOX3,最后 TBOX3 通过天线将信号发送到后台服务器
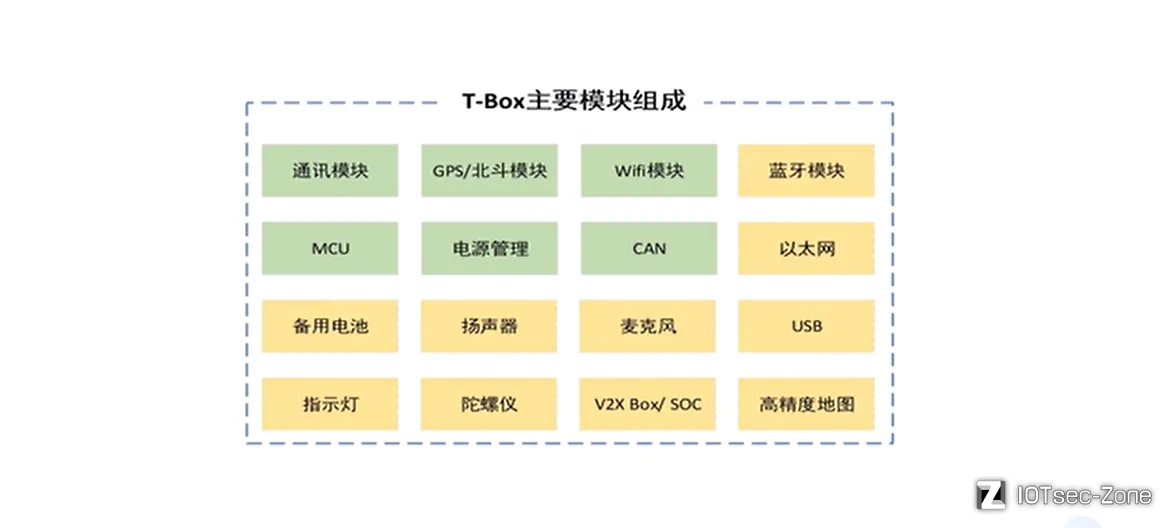
3.7 T-BOX主要模块
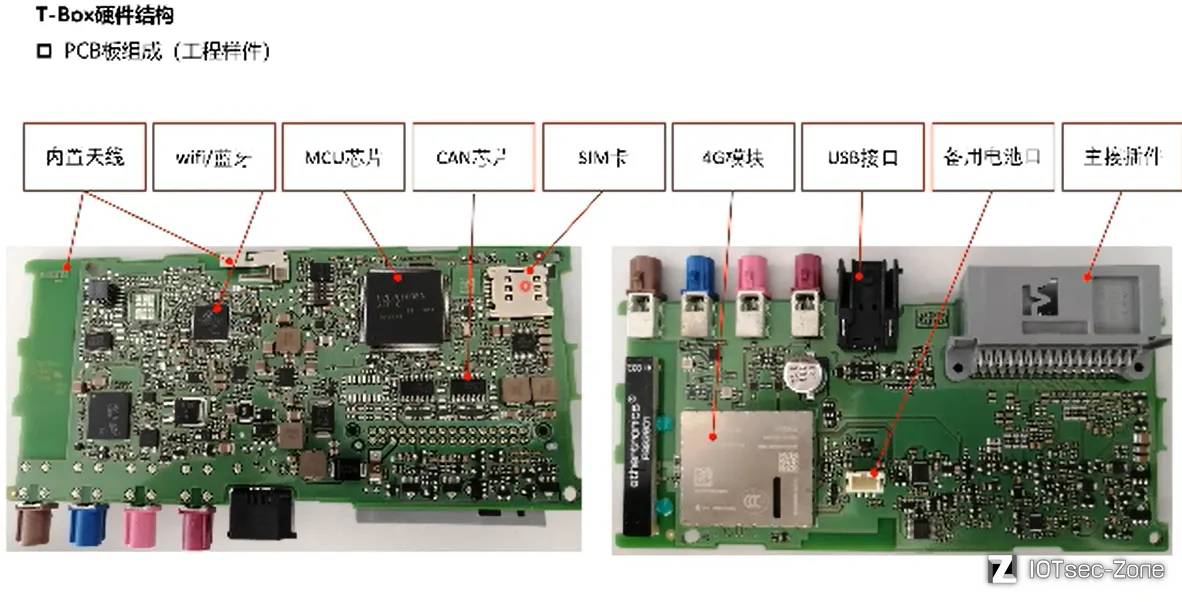
3.8 T-BOX硬件结构
3.9 T-BOX原理
汽车T-BOX与主机通过CAN BUS总线通信,实现指令与信息的传递,从而获取到包括车辆状态、按键状态等信息以及传递控制指令等;通过音频连接,实现双方共用麦克与喇叭输出。与手机APP是通过后台系统以数据链路的形式进行间接通信(双向)。T-BOX与后台系统通信还包括语音和短信两种形式,使用短信形式主要实现一键导航及远程控制功能。
汽车T-BOX可深度读取汽车CAN总线数据和私有协议,T-box终端通过OBD模块和MCU,采集汽车的总线数据和对私有协议的反向控制;T-box同时可以通过GPS模块对车辆位置进行定位,使用网络模块通过网络将数据传出到云服务器。 车主可以在手机APP端通过网络从云服务器中获取车况报告、行车报告、油耗统计、故障提醒、违章查询、位置轨迹、驾驶行为、安全防盗、预约服务、远程找车等信息,还可以在手机APP端通过网络与服务器的连接,间接与网络模块交互,继而通过网络模块与MCU之间的渠道,最终使用MCU提供控制汽车门、窗、灯、锁、喇叭、双闪、反光镜折叠、天窗、监听中控警告和安全气囊状态等服务。
0x04 汽车电子电气EE架构
4.1 新电控系统和架构核心设计方法
4.2 域控制设计方法
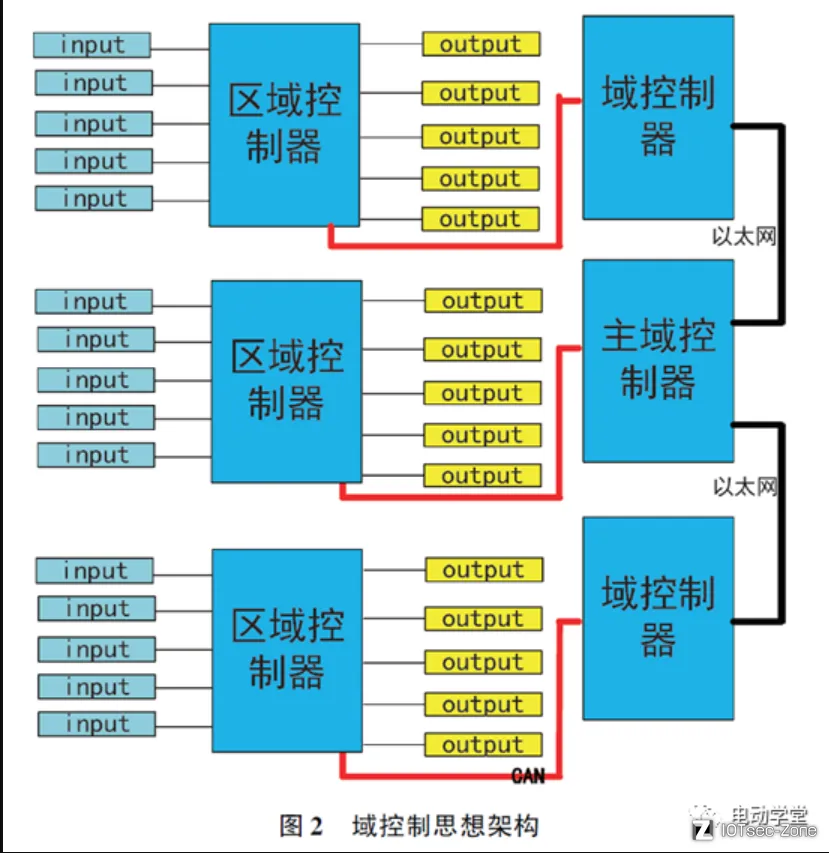
特点:
- 功能分解:实现功能逻辑与实际的物理硬线信号剥离,并把功能逻辑集中到一个域控制器实现
- 接口标准化:域控制器与区域控制器信号接口和区域控制器与所有物理信号输入输出设备接口
- 区域划分:整理出所有输入输出设备,并按位置区域进行分配,接入区域控制器管理
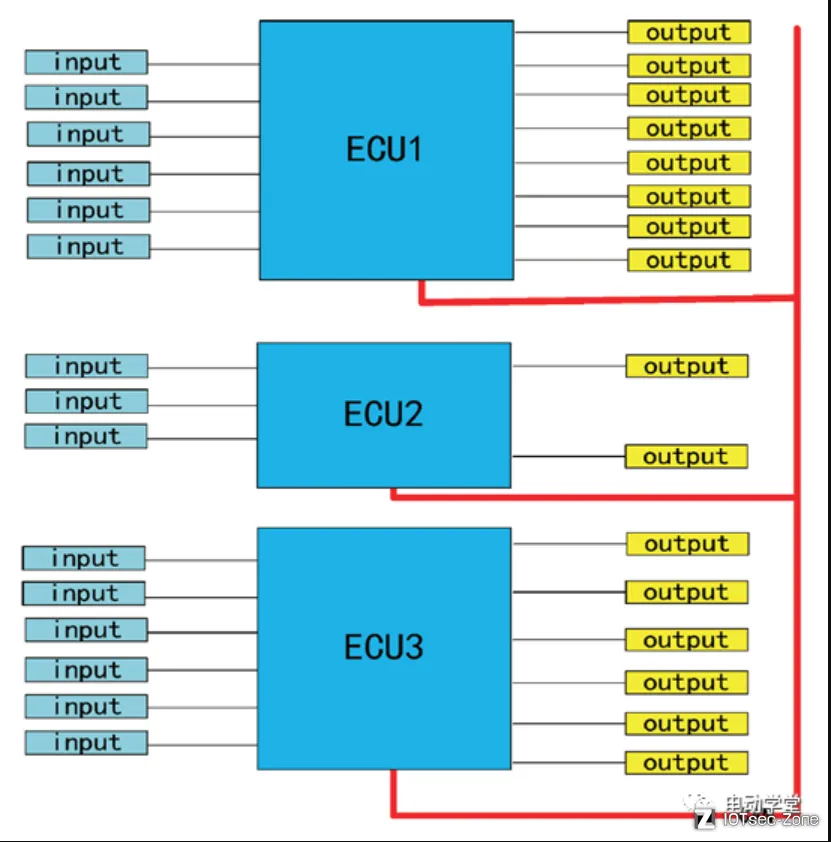
4.3 新电控系统和架构设计
未来车载电控架构的主要ECU节点由域控制器、区域控制器和输入传感器、输出执行器组成:

4.4 EE汽车电子电气架构
- 区域控制器
- 域控制器
- 主域控制器
- 输入传感器
- 输出执行器
4.5 5个主要功能域
- 动力域
- 底盘域
- 智能座舱域
- 自动驾驶(辅助驾驶ADAS)
- 车身域控制器
原文始发于IOTsec-Zone(zebra):车联网安全基础(上)